
mDrawBot のロボットアームで iPad をすりすりしてみたら結構うまくいったので、唐突にロボットアームを自作したくなって作ってみる。Kickstarter にもロボットアームがあって、それなりの値段(5万円位)で買えるようになったのが(以前は10万円以上したので)、そこはもうちょっと勉強も兼ねて構成を考えてみよう。
3D 関係のソフトウェアが苦手なので、LEGO を使って試作する。この日の午前中に、歯車を使ってギアボックスを作ったりピストンを使って練習した後で、これを作ってみている。関節部分を2軸にするという非常に冗長な構成なんだが、こうするとアーム自体がぐにゃぐにゃと自由に動く。構成が簡単になるので初手としてはこれで十分。

自由度が高ければいいというものではないだろうが、手元にある10個ぐらいのマイクロサーボを全部使ってもいいかなという贅沢な構成にしてみる。富豪的プログラミングと同じですね。
昼にこれを作った後で、どうやって実現しようと思って午後いっぱい悩んでいたのだが、ふとどうせならば割り箸でいいじゃないか、夜中に思い立って作ってみたのがこれ。

割り箸を適当に切って、手芸用のマスキングテープでサーボを止めてしまう。強度的には心もとないけど、アイデアを現実にするための試作としてはこれで十分なはず。…が、ちょっと動かしてみると、やっぱり強度が足りないので不安が出てきて、この支柱の部分をレゴで置き換えてみた。
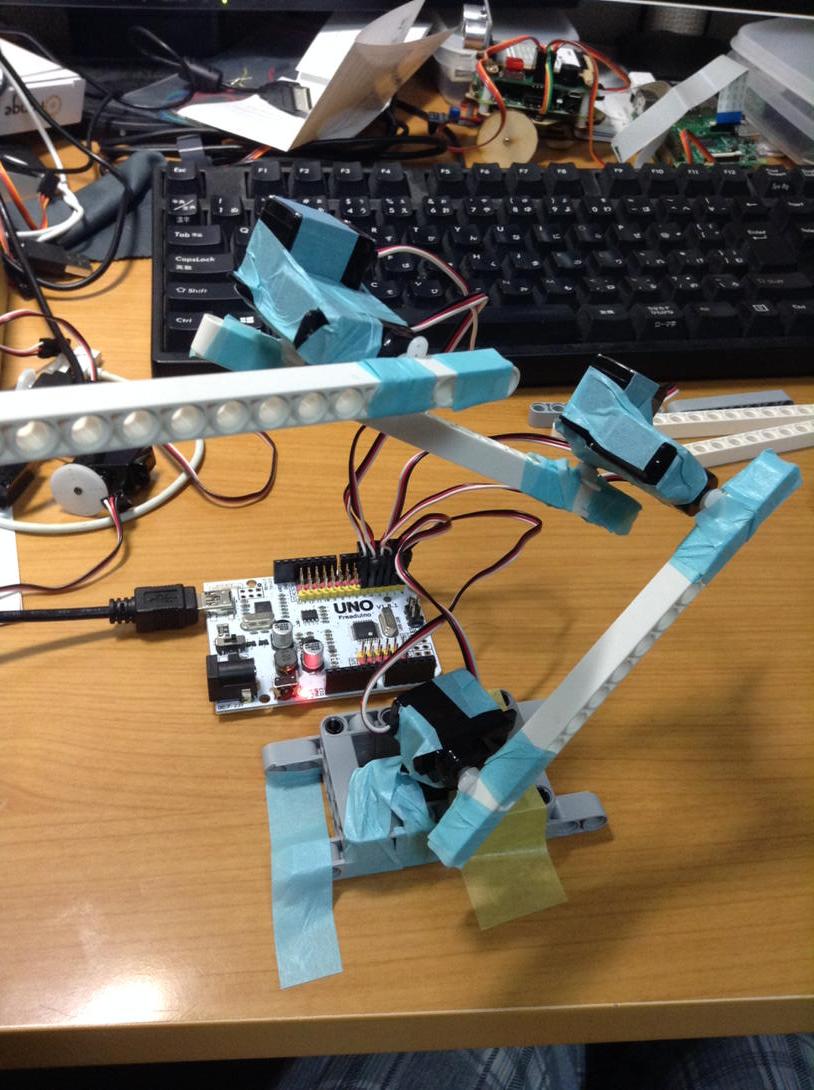
LEGO マインドストームの支柱を使うと軽いので、マイクロサーボでも十分に支えられる。最終的にはアルミフレームを考えるんだろうけど、これまた、途中の段階では試行錯誤するために LEGO が有効だ。まあ、LEGO とはいえサーボの接続部分はマスキングテープで止めてあるので LEGO っぽい使い方は全くしていない。
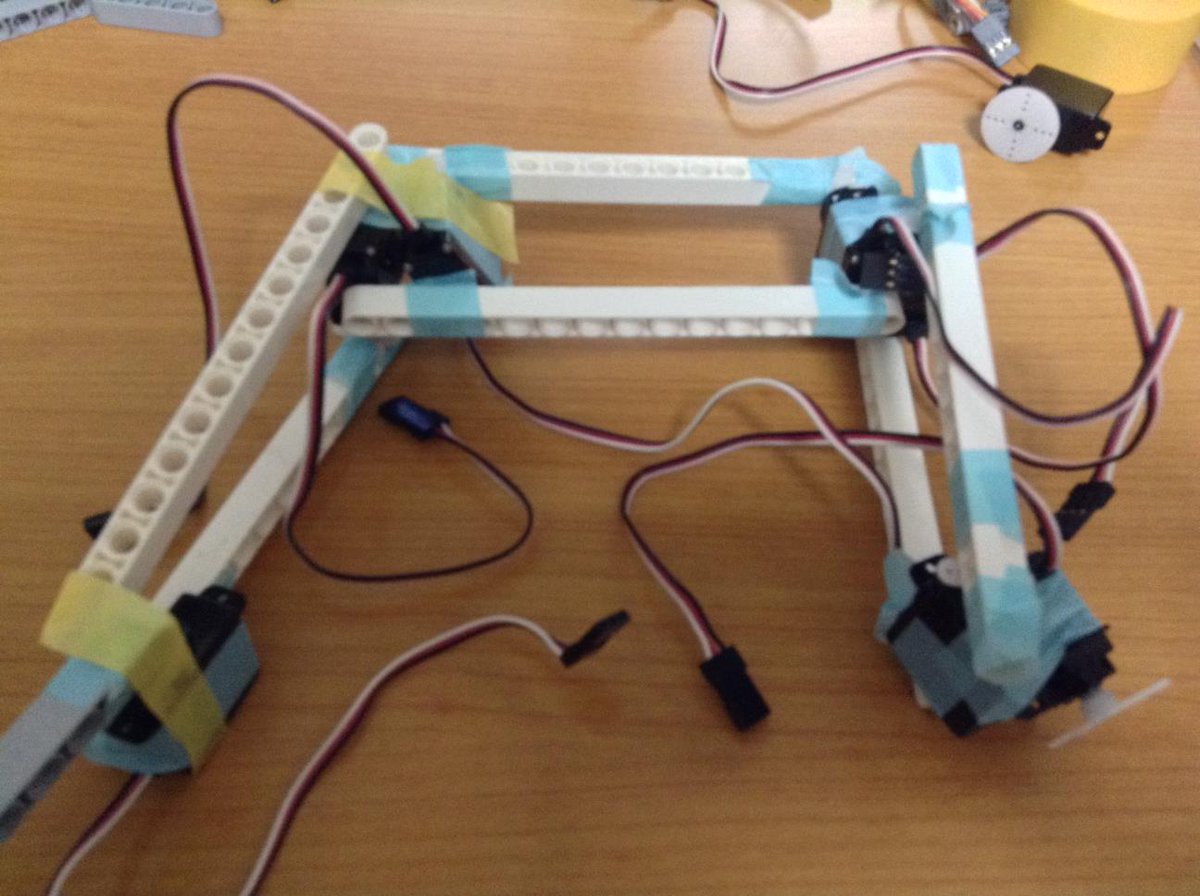
そして、1本の支柱では強度的に足りないので、2本以上の支柱を考えたのがこれ。

これだとギアを支柱で挟む形になるので強度が保てる。が、それをどうやって実際のサーボにつなげるかよく分からずにいたのがこの状態。ひとまず、マスキングテープで形だけ作ってみる。
さらにバリエーションとして1本支柱でサーボの接続の向きを変えてみる。台座はカメラ撮影でつかうものを流用している。台座自体は2点支持なのでしっかりしているが、腕の部分は1点支持のためゆらゆら揺れてしまう。

じゃあ、台座のように二点支持にすればよいだろう。その場合、アルミフレームをまげて作るのが定番だろうと再び悩んだのだが、この段階でその工作は避けたい。トライ&エラーのサイクルがのろくなってしまうからね。で、何とかならないだろうかと思って作ったのがこれ。
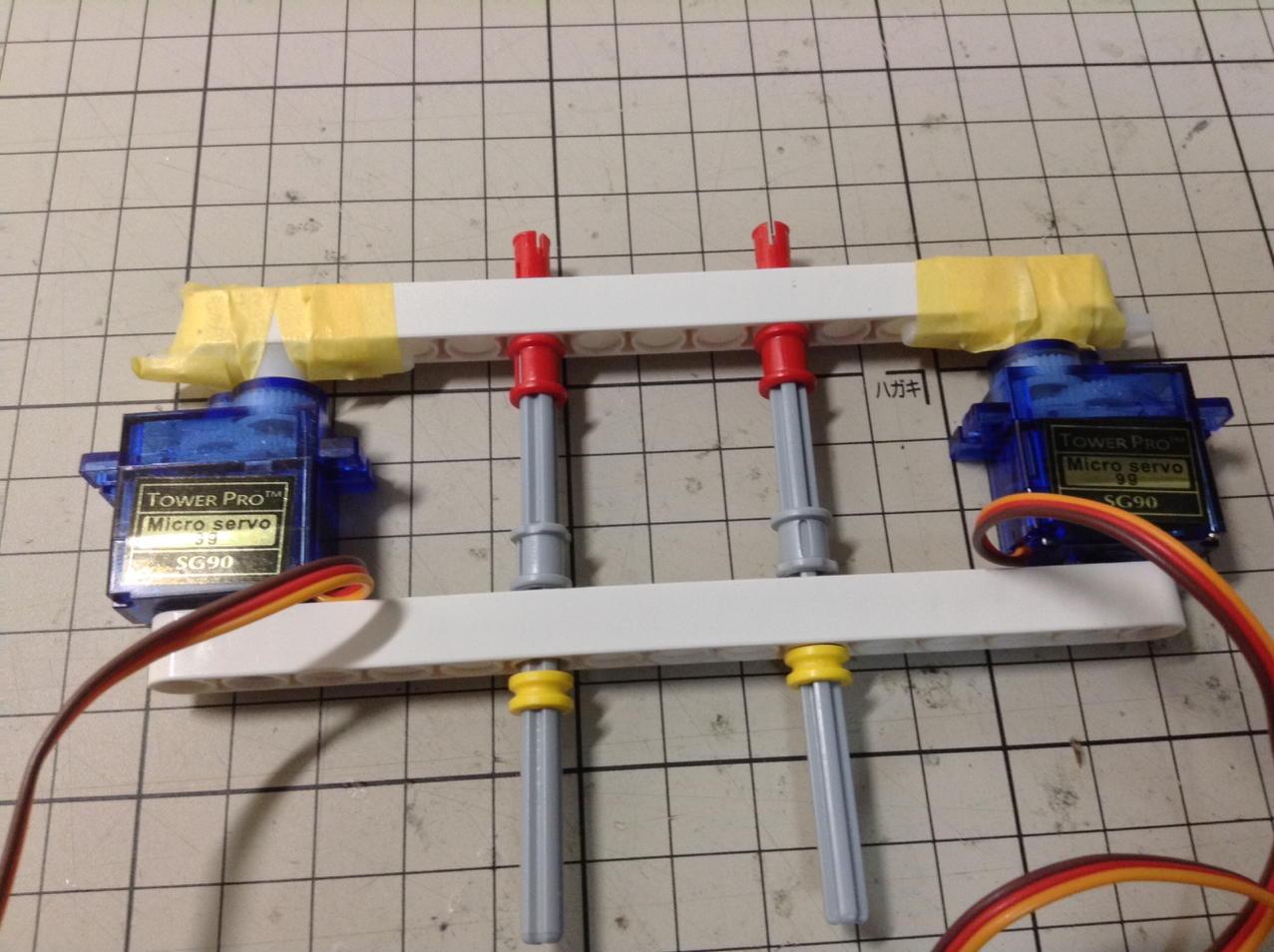
普通はサーボの脇の部分にU字型のフレームを置いて二点で支持することになるのだが、直接サーボのお尻の部分にねじを埋め込んでしまった。安価なサーボなのでこれで十分だし、試作なのでこのほうが取り外しが利いてよい。サーボの回るところにも二本のビスをつけて LEGO の支柱を支えられるようにしてある。
2つのサーボを2本の支柱でつなげるので強度が増している。ただし、サーボから直接動力を得るスタイルなので関節部分が大きくなってしまうが、まあ、これはこれで良しとする。
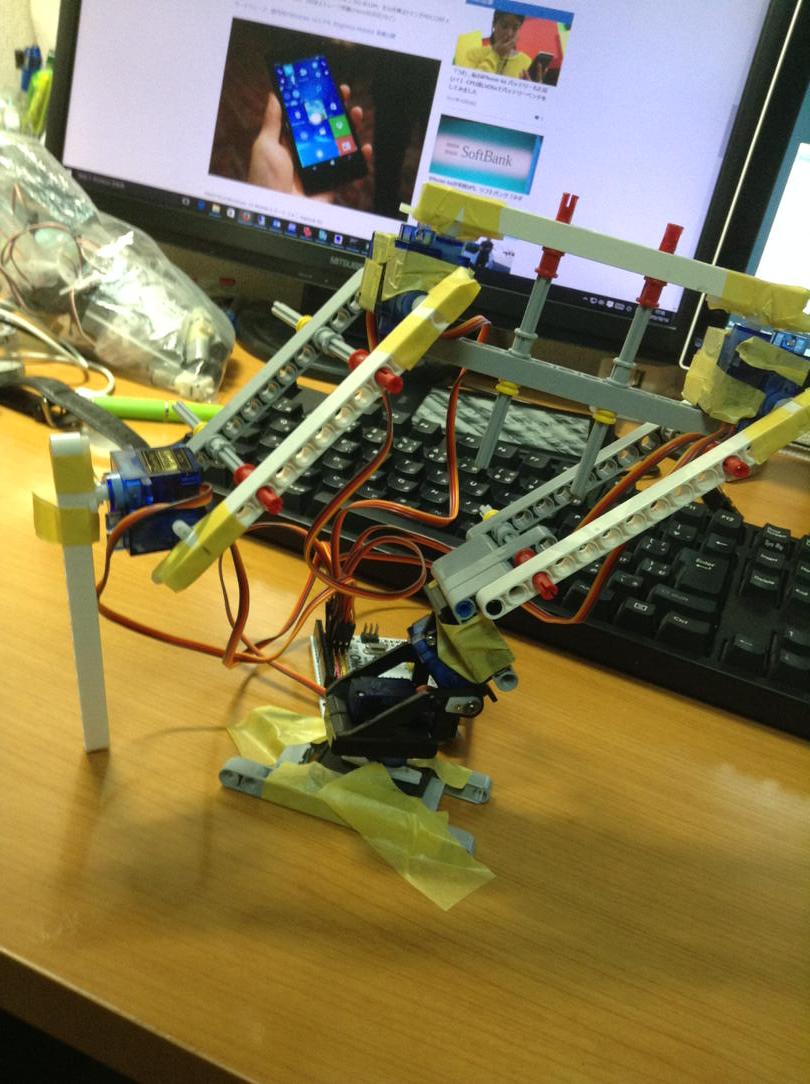
肩が台座に相当して、肘に当たる部分が2つある。冗長ではあるけど、これだと動きがスムースになりそうなのでこれで試作していく予定。肩に近い1つめの肘の負担が大きい(左の2つ目の肘と手を支えることになる)ので、ここの関節は梁を使って台座のほうから引っ張るようにしないとダメかなと思っている。
ひとまずは Arduino Uno で適当に動かしてみよう…という訳で続く。

